
工业机器人
2021-07-27 来源: 智造苑
1954年,美国人乔治·德沃尔申请了“可编程关节式转移物料装置”的专利,并与约瑟夫·恩格尔伯格合作成立了世界上第一个机器人公司Unimation,研发出世界上第一台工业机器人Unimate。在此之后的几十年间,工业机器人不仅改变了汽车制造业,也拓展到其他制造业和非制造业,经历了摇篮阶段到实用阶段。随着计算机技术的进步和深入,机器人逐渐向着多传感器智能控制方向发展。
「 1. 工业机器人定义与分类 」
1)工业机器人的定义
在工业领域内应用的机器人被称为工业机器人。工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的机电一体化设备,被称为工业自动化的三大支持技术之一。世界各国对工业机器人的定义不尽相同,且随着机器人技术的不断发展,内涵的逐渐丰富,工业机器人的定义也在随之变化。
美国工业机器人协会(RIA)、日本工业机器人协会(JIRA)、德国标准(VDI)以及国际标准化组织(ISO)等都对工业机器人做出过定义。目前多采用的是国际标准化组织(ISO)对工业机器人的定义,即“工业机器人是一种能自动控制、可重复编程,多功能、多自由度的操作机,能搬运材料、工件或操持工具,来完成各种作业”。我国现行的推荐性国家标准《机器人与机器人装备 词汇》(GB/T 12643—2013),等同采用了国际标准化组织的ISO 8373:2012标准,沿用了国际标准组织对工业机器人的定义。
2)工业机器人的组成
工业机器人由执行机构(图1中的1、3)、控制系统(图1中的2)、驱动系统(如液压缸、电机等)、检测系统四大部分构成。

图1 工业机器人的组成
这四部分之间的运作关系如图2所示,由控制系统传达信号到驱动系统,驱动执行装置动作,检测系统监控执行装置的执行结果,并反馈回控制系统,及时调整控制信号。
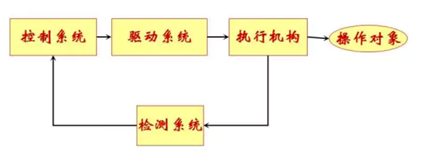
图2 工业机器人各部分关系
(1)执行机构。执行机构是具有和人手臂相似的动作功能,可在空间抓放物体或执行其他操作的机械装置,通常包括机座、手臂、手腕和末端执行器。见图1中的1、3。
(2)控制系统。控制系统是机器人的大脑,支配机器人按规定的程序运动,并记忆动作顺序、运动轨迹、运动速度等指令信息,以实现重复运动。
(3)驱动系统。驱动系统是将控制系统发出的控制指令信号放大,驱动执行机构运动的传动装置。常见的有电气、液压、气动和机械等方式。
(4)检测系统。检测系统主要检测执行系统的运动位置和状态,并实时将实际位置、状态信息反馈给控制系统,控制系统将其与设定值进行比较,实时调整发送给驱动系统的指令,使得执行系统达到设定位置和状态。检测系统通常是各种传感器。
3)工业机器人的分类
工业机器人有多种分类方式:①按照程序输入方式划分,可分为编程输入型和示教输入型两类;②按照驱动方式划分,可分为液压驱动、气压驱动、电气驱动等类型;③按照机械结构划分,可划分为串联机器人、并联机器人、串并混联机器人;④按照运动坐标形式划分,可分为圆柱坐标型机器人、球坐标型机器人、直角坐标型机器人、多关节型机器人、平面关节型(SCARA)机器人等5种;⑤按照应用领域划分,可分为焊接机器人、装配机器人、搬运机器人、码垛机器人、上下料机器人、包装机器人、喷涂机器人、切割机器人等。⑥按照负载来划分,可分为小型负载机器人(负载小于20kg)、中型负载机器人(负载介于20~100kg 之间)和大型负载机器人(负载大于 100kg)。
「 2. 工业机器人的发展趋势 」
工业机器人具有可编程、拟人化、通用性、机电一体化等特征。可编程,是指工业机器人可以随着其工作环境变化的需要进行再编程,因此,它在小批量、多品种的柔性制造过程中扮演重要角色,可发挥均衡、高效率的功用与价值,是柔性制造系统的重要组成部分之一。拟人化,是指工业机器人在机械结构上有类似于人体的行走、腰转等动作,以及大臂、小臂、手腕、手爪等部位。通用性,是指除了专门设计的工业机器人外,一般工业机器人在执行不同的作业任务时具有较好的通用性;比如,更换工业机器人末端执行器(手爪、工具等)便可以执行不同的作业任务。机电一体化,是指工业机器人实现了机械技术、微电子技术、信息技术等的有机结合,是典型的机电一体化产品。
工业机器人在制造业中的优势主要体现为自动化、高效率和安全性。随着工业机器人在现代制造业发展过程中的价值越来越突出,工业机器人正呈现以下发展趋势:
1)工业机器人走向智能化
工业机器人的发展可分为三个阶段,即从第一代的示教再现机器人(通过示教存储信息,工作时读出这些信息,向执行机构发出指令,执行机构按指令再现示教的操作,广泛应用于焊接、上下料、喷漆和搬运等),到带有简单感觉系统的机器人(带有视觉、触觉等功能,可以完成检测、装配、环境探测等作业),再到智能机器人(不仅具备感觉功能,而且能在无人指令情况下,根据所处环境自行决策,规划出行动)。
目前,在工业中应用的机器人绝大部分都不智能。因此,智能化是未来工业机器人的主要发展方向。在操作臂技术上,将向着提高功率密度、通用性、轻量化、多自由度、多种材料、仿人体结构、高负重与自重比及一体化机构方向发展。在传感与感知上,通过采用识别、跟踪、力觉、视觉等传感器,实现对各种外部环境、各种复杂作业的自主识别。在安全技术上,工业机器人由单机时代的自身安全进化到物联网时代的网络安全;在导航技术上,工业移动机器人则向多模态、室外及无标识自然导航方向发展。
2)工业机器人由单机走向多机协同
目前工业机器人的应用仍以单机自动化为主,但在一些应用场景环节已实现了多机器人的协同应用。比如,在汽车行业的车身喷涂、焊接等场景,往往一个工位上需要有多台机器人来协同工作,与此同时工业机器人主流厂商也针对这些场景推出了多机器人协同应用解决方案。以安川电机为例,在2020年中国国际工业博览会上,安川电机就展示了商用车白车身焊接及喷涂工位的多机器人协同应用。其中,在商用车白车身喷涂工位,安川电机展示了利用喷涂机器人、开门机器人等四款不同的机器人共同完成车身的喷涂作业;而在商用车白车身的焊接工位,同样也是在一个工位内配置多种类型的机器人,完成搬运、点焊以及弧焊作业。而为了实现高效的生产,工业机器人多机协同作业将会有更多应用。
3)传统工业机器人将走向人机共融
传统工业机器人的感知能力较弱,只能在稳定的环境中工作,也就是主要在结构化环境中执行各类确定性任务,否则就容易出错甚至伤人毁物。为克服上述不足、有效扩展和延伸人类能力,共融机器人应运而生并代表了未来工业机器人的发展方向。所谓,共融机器人,是指能与作业环境、人、其他机器人自然交互,自主适应复杂动态环境并协同作业的机器人。“共融”具体包含机器人与环境的自然交互、机器人之间的互助互补、机器人与人之间的协同作业三层含义。而为实现以上与环境,与其他机器人,与人类共存、共事、共融的目标,机器人需要在“身体”“感知”和“意识”上进行革新。
4)复合式工业机器人成趋势
为了满足更多样的应用场景,如今除了工业机器人单体之外,还出现了许多复合式工业机器人,例如桁架式机械手、轨道式机器人、移动协作机器人(AMR/AGV+协作机器人)等,用于工业机器人移动式操作的场景。图3 是库卡(KUKA)线性滑轨机器人和KUKA移动机器人KMR iiwa。线性滑轨,相当于给工业机器人又添加了一个轴,从而增大了工业机器人的工作空间,而在同一个线性滑轨上,通常可以使用多个机器人。KUKA移动机器人KMR iiwa则使得人机协作更加灵活。

图 3 KUKA线性滑轨机器人与KUKA移动机器人KMR iiwa(来源:KUKA官网)
5)工业机器人应用行业与场景不断延伸拓展
世界第一台工业机器人应用于汽车行业,直至目前,汽车工业仍然是工业机器人最大的应用市场,也是标准最高、使用密度最高的市场。但与此同时,工业机器人也正在向一般工业拓展,应用场景不断深化。在行业应用上,工业机器人已迅速拓展到3C电子、金属加工、医疗、烟草、物流、食品、制药、塑料、橡胶、化工等行业。在具体应用场景上,工业机器人的应用则包括焊接、喷涂、打磨、涂胶、上下料、去毛刺、搬运、装配、分拣、包装、检测等。
6)云化机器人及工业机器人云平台兴起
在智能制造生产场景中,需要工业机器人有自组织和协同的能力来满足柔性生产,这就带来了云化机器人(机器人大脑在云端)及工业机器人云平台的需求。和传统机器人相比,云化机器人需要通过网络连接到云端的控制中心,基于超高计算能力的平台,并通过大数据和人工智能对生产制造过程进行实时运算控制。未来,随着5G、AI、云计算等技术的发展成熟,云化机器人及工业机器人云平台或将成为新一轮发展热点。
相关新闻
版权声明
1、凡本网注明“来源:中国轻工业网” 的作品,版权均属于中国轻工业网,未经本网授权,任何单位及个人不得转载、摘编或以其它方式使用。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:中国轻工业网”。违反上述声明者,本网将追究其相关法律责任。
2、凡本网注明 “来源:XXX(非中国轻工业网)” 的作品,均转载自其它媒体,转载目的在于信息之传播,并不代表本网赞同其观点和对其真实性负责。
3、如因作品内容、版权和其它问题需要同本网联系的,请于转载之日起30日内进行。
4、免责声明:本站信息及数据均为非营利用途,转载文章版权归信息来源网站或原作者所有。