
工业机器人性能与控制
2023-06-07 来源: 智造苑
工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业中重要的自动化装备。机器人技术、数控技术和PLC技术并称为工业自动化的三大支持技术。机器人技术及其产品发展非常迅速,已成为柔性制造系统(FMS)、自动化工厂(FA)、计算机集成制造系统(CIMS)的自动化工具,同时也是工业4.0智能化工厂中重要的一环[1]。
「 1. 工业机器人系统组成及性能指标 」
1)工业机器人系统组成
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。一个典型的工业机器人如图1所示,工业机器人按照技术发展水平可以分为三代:第一代示教再现机器人、第二代感知机器人、第三代智能机器人。

图1 工业机器人系统结构组成
如图1所示,第一代工业机器人在外部结构上主要由三部分组成:操作机(或称机器人本体)、控制器和示教器。对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
(1)操作机:用于完成各种作业任务的机械主体,主要包含机械臂、驱动装置、传动单元以及内部传感器等部分。
(2)控制器:是根据指令及传感器信息控制机器人本体完成一定动作的装置,是决定机器人功能和性能的关键部分,也是工业机器人更新和发展最快的部分。
(3)示教器:是机器人的人机交互接口,操作者可通过它对机器人进行编程或手动操纵机器人移动。
工业机器人从功能上由3大部分6个子系统组成。3大部分分别是机械部分、控制部分和传感部分。6个子系统分别是驱动系统、机械结构系统、人机交互系统、控制系统、感受系统、机器人与环境交互系统,其对应关系见图2。
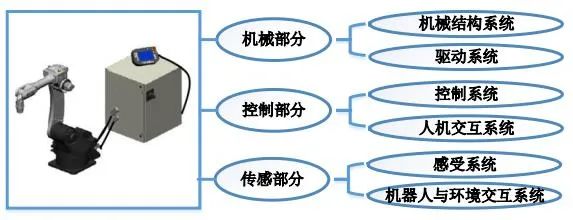
图2 工业机器人系统功能组成
2)工业机器人性能指标
工业机器人的性能指标是机器人生产厂商在产品供货时所提供的技术数据,反映了机器人的适用范围和工作性能,是选择机器人时必须考虑的问题。尽管机器人厂商提供的技术数据不完全相同,工业机器人的结构、用途和用户的需求也不相同,但其主要的性能指标一般为:自由度、工作精度、工作范围、额定负载、最大工作速度等[2],具体含义见表1。
表1 工业机器人性能指标及含义
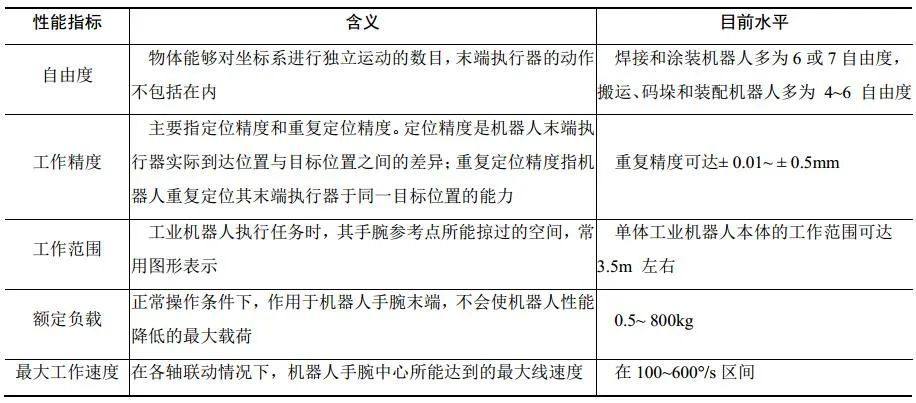
需要说明的是,机器人在工作范围内可能存在奇异点。奇异点是由于机器人结构的约束,导致关节失去某些特定方向的自由度的点。奇异点通常存在于作业空间的边缘,如奇异点连成一片,则称为“空穴”。机器人运动到奇异点附近时,由于自由度的逐步丧失,关节的姿态会急剧变化,这将导致驱动系统承受很大的负载而产生过载。因此,对于存在奇异点的机器人来说,其工作范围还需要除去奇异点和空穴。图3所示边缘不规则处即为除去部分。

图3 ABB工业机器人IRB1410(左)和IRB8700(右)工作范围
「 2. 工业机器人的控制 」
1)工业机器人控制的特点及要求
多数工业机器人各关节的运动是相互独立的,为了实现机器人末端执行器的位置精度,需要多关节的协调。因此,工业机器人控制系统与普通的控制系统相比要复杂,具有以下特点:
(1)本质上是一个非线性系统。
(2)是由多关节组成的多变量控制系统,且各关节间具有耦合作用。
(3)是一个时变系统,其动力学参数随着关节运动位置的变化而变化。
(4)要求对环境条件、控制指令进行测定和分析,自动选择最佳控制规律。
(5)具有较高的重复定位精度,系统刚性好。
(6)不允许有位置超调,否则可能发生碰撞,动态响应要快。
考虑到工业机器人控制具有以上特点,在设计工业机器人控制系统时必须满足如下基本要求:
(1)多轴运动的协调控制,以产生要求的工作轨迹。
(2)较高的位置精度,很大的调速范围。
(3)系统的静差率要小,即要求系统具有较好的刚性。
(4)位置无超调,动态响应快。
(5)需采用加减速控制。
(6)各关节的速度误差系数应尽量一致。
(7)从操作的角度看,要求控制系统具有良好的人机界面,尽量降低对操作者要求。
(8)从系统的成本角度看,要求尽可能地降低系统的硬件成本,更多的采用软件伺服的方法来完善控制系统的性能[3]。
2)工业机器人控制方式
从工业机器人的控制特点和控制要求出发,实现工业机器人的控制涉及诸多内容,主要分为机器人的底层控制与上层控制。其中,底层控制包括机器人本体(即机械部分)、驱动电路部分、传感器部分以及控制策略(如PID控制)等。上层控制包括机器人的运动分析、路径规划以及机器人的软件部分[4]。根据不同的分类方法,机器人控制方式可以有不同的分类。按照被控对象可以分为位置控制、速度控制、力控制、力矩控制、力/位混合控制等[5],这些主要是底层控制,现对主要控制方式加以说明。
(1)工业机器人位置控制:目的是要使机器人各关节实现预先所规划的运动,最终保证工业机器人末端执行器沿预定的轨迹运行,通常采用交流伺服系统或直流伺服系统实现。
(2)工业机器人力(力矩)控制:需要分析机器人末端执行器与环境的约束状态,并根据约束条件制定控制策略。此外,还需要在机器人末端安装力传感器,用来检测机器人与环境的接触力。控制系统根据预先制定的控制策略对这些力信息作出处理后,控制机器人在不确定环境下进行与该环境相适应的操作,从而使机器人完成复杂的作业任务。
(3)工业机器人速度控制:通常与位置控制同时实现。例如,在连续轨迹控制方式的情况下,工业机器人需要按预定的指令来控制运动部件的速度和实行加、减速,以满足运动平稳、定位准确的要求。由于工业机器人是一种工作情况(或行程负载)多变、惯性负载大的运动机械,要处理好快速与平稳的矛盾,必须控制起动加速和停止前的减速这两个过渡运动区段。而在整个运动过程中,速度控制通常情况下也是必须的。
3)工业机器人智能控制
工业机器人的智能控制方式主要指在不确定或未知条件下作业,机器人需要通过传感器获得周围环境的信息,根据自己内部的知识库做出决策,进而对各执行机构进行控制,自主完成给定任务,属于机器人的上层控制。若采用智能控制技术,机器人会具有较强的环境适应性及自学习能力。智能控制方法与人工神经网络、模糊算法、遗传算法、专家系统等人工智能的发展密切相关。现以神经网络算法在移动机器人中的应用为例来阐述智能控制与工业机器人的结合。
1)工业机器人控制的特点及要求
多数工业机器人各关节的运动是相互独立的,为了实现机器人末端执行器的位置精度,需要多关节的协调。因此,工业机器人控制系统与普通的控制系统相比要复杂,具有以下特点:
(1)本质上是一个非线性系统。
(2)是由多关节组成的多变量控制系统,且各关节间具有耦合作用。
(3)是一个时变系统,其动力学参数随着关节运动位置的变化而变化。
(4)要求对环境条件、控制指令进行测定和分析,自动选择最佳控制规律。
(5)具有较高的重复定位精度,系统刚性好。
(6)不允许有位置超调,否则可能发生碰撞,动态响应要快。
考虑到工业机器人控制具有以上特点,在设计工业机器人控制系统时必须满足如下基本要求:
(1)多轴运动的协调控制,以产生要求的工作轨迹。
(2)较高的位置精度,很大的调速范围。
(3)系统的静差率要小,即要求系统具有较好的刚性。
(4)位置无超调,动态响应快。
(5)需采用加减速控制。
(6)各关节的速度误差系数应尽量一致。
(7)从操作的角度看,要求控制系统具有良好的人机界面,尽量降低对操作者要求。
(8)从系统的成本角度看,要求尽可能地降低系统的硬件成本,更多的采用软件伺服的方法来完善控制系统的性能[3]。
2)工业机器人控制方式
从工业机器人的控制特点和控制要求出发,实现工业机器人的控制涉及诸多内容,主要分为机器人的底层控制与上层控制。其中,底层控制包括机器人本体(即机械部分)、驱动电路部分、传感器部分以及控制策略(如PID控制)等。上层控制包括机器人的运动分析、路径规划以及机器人的软件部分[4]。根据不同的分类方法,机器人控制方式可以有不同的分类。按照被控对象可以分为位置控制、速度控制、力控制、力矩控制、力/位混合控制等[5],这些主要是底层控制,现对主要控制方式加以说明。
(1)工业机器人位置控制:目的是要使机器人各关节实现预先所规划的运动,最终保证工业机器人末端执行器沿预定的轨迹运行,通常采用交流伺服系统或直流伺服系统实现。
(2)工业机器人力(力矩)控制:需要分析机器人末端执行器与环境的约束状态,并根据约束条件制定控制策略。此外,还需要在机器人末端安装力传感器,用来检测机器人与环境的接触力。控制系统根据预先制定的控制策略对这些力信息作出处理后,控制机器人在不确定环境下进行与该环境相适应的操作,从而使机器人完成复杂的作业任务。
(3)工业机器人速度控制:通常与位置控制同时实现。例如,在连续轨迹控制方式的情况下,工业机器人需要按预定的指令来控制运动部件的速度和实行加、减速,以满足运动平稳、定位准确的要求。由于工业机器人是一种工作情况(或行程负载)多变、惯性负载大的运动机械,要处理好快速与平稳的矛盾,必须控制起动加速和停止前的减速这两个过渡运动区段。而在整个运动过程中,速度控制通常情况下也是必须的。
3)工业机器人智能控制
工业机器人的智能控制方式主要指在不确定或未知条件下作业,机器人需要通过传感器获得周围环境的信息,根据自己内部的知识库做出决策,进而对各执行机构进行控制,自主完成给定任务,属于机器人的上层控制。若采用智能控制技术,机器人会具有较强的环境适应性及自学习能力。智能控制方法与人工神经网络、模糊算法、遗传算法、专家系统等人工智能的发展密切相关。现以神经网络算法在移动机器人中的应用为例来阐述智能控制与工业机器人的结合。
以图中所示移动机器人为例,摄像机安装在移动机器人的上方,获取障碍物的三维图像。超声波传感器组安装在移动机器人的前方(摄像机的正下方),获取障碍物与移动机器人之间的距离信息,如图4所示。
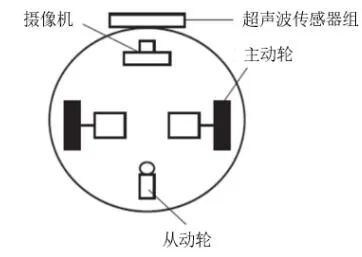
图4 多传感器布置图
利用神经网络方法进行视觉和超声波传感器信息融合,并输出到下一级,识别出障碍物的类型,这样使移动机器人在不确定的环境中行走时能够避障,提高其导航能力。工业机器人利用智能信息进行综合决策避开障碍物的主要步骤如下:
(1)在机器人行进的同时,测距系统每隔一个很短的时间进行一次环境探测,根据超声波传感器获得的有关障碍物的距离信息,判断移动机器人是否需要减速,以及是否需要从CCD摄像机取样。
(2)当测距系统探测到障碍物距移动机器人的距离为中等时,降低机器人的速度;当障碍物距移动机器人的距离为近时,从CCD摄像机获取有关障碍物的二维图像,并提取其左右边缘的坐标。
(3)将超声波传感器和CCD摄像机获得的有关障碍物的信息进行分组及预处理,送入BP神经网络控制器进行融合。
(4)预先经过避障知识学习的BP神经网络控制器根据外部多传感器采集的信息,作出相应的避障决策,避开障碍物。
参考文献
[1] 朱洪前.工业机器人技术[M].北京:机械工业出版社,2019.[2] 陈万米.机器人控制技术[M].北京:机械工业出版社,2017.[3] 郭彤颖,安冬.机器人学及其智能控制[M].北京:人民邮电出版社,2014.[4] 张宪民.机器人技术及其应用[M].北京:机械工业出版社,2017.[5] 张新星.工业机器人应用基础[M].北京:北京理工大学出版社,2017.
引自:《智能制造装备基础》(作者:吴玉厚、陈关龙、张珂、赵德宏、巩亚东、刘春时)
相关新闻
版权声明
1、凡本网注明“来源:中国轻工业网” 的作品,版权均属于中国轻工业网,未经本网授权,任何单位及个人不得转载、摘编或以其它方式使用。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:中国轻工业网”。违反上述声明者,本网将追究其相关法律责任。
2、凡本网注明 “来源:XXX(非中国轻工业网)” 的作品,均转载自其它媒体,转载目的在于信息之传播,并不代表本网赞同其观点和对其真实性负责。
3、如因作品内容、版权和其它问题需要同本网联系的,请于转载之日起30日内进行。
4、免责声明:本站信息及数据均为非营利用途,转载文章版权归信息来源网站或原作者所有。